|
Jiaheng Hu
胡佳恒
Welcome to my homepage! My name is Jiaheng Hu (Jeff).
I'm a final year PhD candidate in CS at UT-Austin, fortunate to be co-advised by Professor Peter Stone and Professor Roberto Martín-Martín.
My research is generously supported by the Two Sigma PhD Fellowship.
During my PhD, I spent time as research intern at Amazon FAR (current), Google Deepmind, and Allen AI.
Previously, I obtained my M.S. in Robotics at Carnegie Mellon Univeristy, supervised by Professor Howie Choset;
and graduated summa cum laude from Columbia University with a B.S. in Computer Science.
I'm also a student representative of the IEEE/RAS Mobile Manipulation TC.
Email /
Google Scholar /
Twitter /
LinkedIn /
Github
|

|
 FAR
FAR
 DeepMind
DeepMind
 Allen AI
Allen AI
 UT-Austin
UT-Austin
 CMU RI
CMU RI
 Columbia
Columbia
Research
I research Robot Learning and Reinforcement Learning.
My long-term goal is to develope self-improving robots that can learn and adapt autonomously in unstructured environments.
Nowadays, I'm particularly interested in VLA post-training and world models / simulation.
|
News
- Nov 2025: I will be joining Amazon FAR as a Research Intern in summer 2026.
- June 2025: I gave a talk at Google Deepmind Control Team on Self-Improving Robots.
- Apr 2025: I am honored to be awarded the Two Sigma PhD Fellowship!
- Apr 2025: I am selected for the ICRA Doctoral Consortium this year.
- Nov 2024: I gave a guest lecture at University of Michigan on Continually Learning Robots.
- Aug 2024: I gave two talks at Nvidia SRL and University of Washington on Factorization in Robotic RL.
|
|
Selected Publications (Full list)
*: Equal contribution. †: Equal advising.
|
|
|
Simple Recipe Works: Vision-Language-Action Models are Natural Continual Learners with Reinforcement Learning
Jiaheng Hu*,
Jay Shim*,
Chen Tang,
Yoonchang Sung,
Bo Liu,
Peter Stone†,
Roberto Martín-Martín†
RLJ/RLC, 2026
paper /
code
|
|
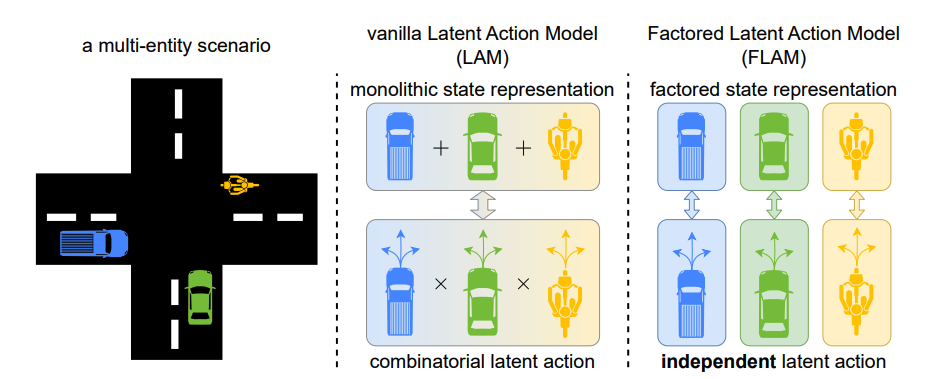
Factored Latent Action World Models
Zizhao Wang*,
Chang Shi*,
Jiaheng Hu,
Kevin Rohling,
Roberto Martín-Martín,
Amy Zhang,
Peter Stone
ICML, 2026
paper
|
|
Mash, Spread, Slice! Learning to Manipulate Object States via Visual Spatial Progress
Priyanka Mandikal,
Jiaheng Hu,
Shivin Dass,
Sagnik Majumder,
Roberto Martín-Martín†,
Kristen Grauman†
ICRA, 2026
CoRL Beyond Rigid Worlds Workshop, 2025, Best Poster Award
paper /
website
|
|
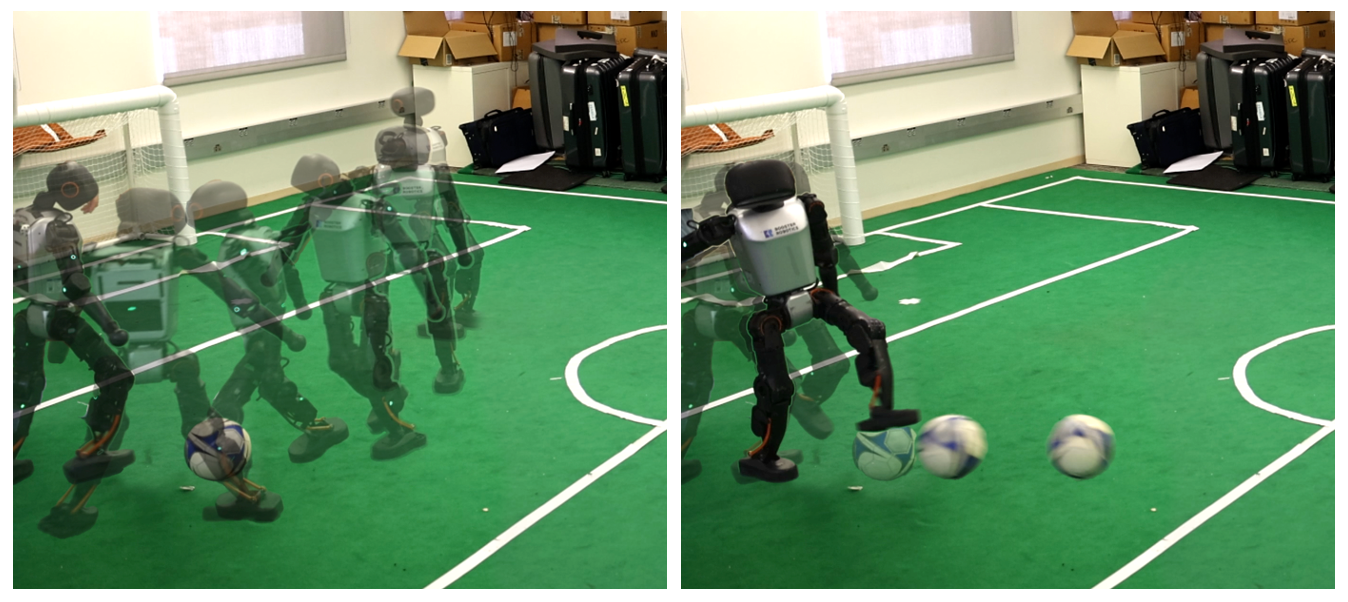
Learning Agile Striker Skills for Humanoid Soccer Robots from Noisy Sensory Input
Zifan Xu,
Myoungkyu Seo,
Dongmyeong Lee,
Hao Fu,
Jiaheng Hu,
Jiaxun Cui,
Yuqian Jiang,
Zhihan Wang,
Anastasiia Brund,
Joydeep Biswas,
Peter Stone
ICRA, 2026
paper
|
|
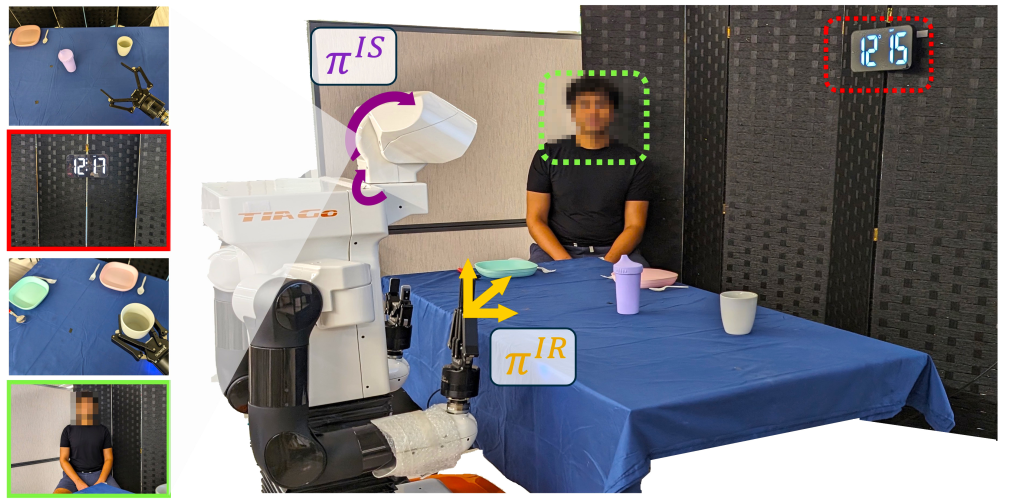
SLAC: Simulation-Pretrained Latent Action Space for Whole-Body Real-World RL
Jiaheng Hu,
Peter Stone,
Roberto Martín-Martín
CoRL, 2025
Humanoid Dexterous Manipulation Workshop, 2025, Oral Spotlight
paper /
code /
website /
video /
press
|
|
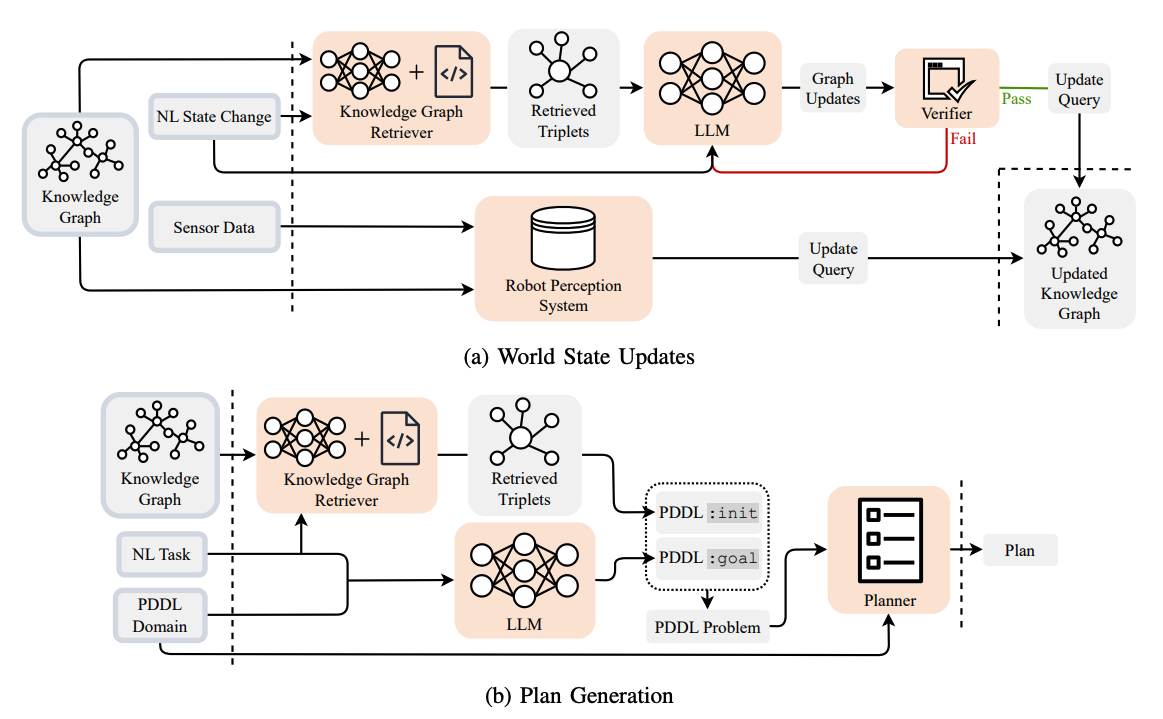
L3M+P: Lifelong Planning with Large Language Models
Krish Agarwal*,
Yuqian Jiang*,
Jiaheng Hu,
Bo Liu,
Peter Stone
IROS, 2025
paper
|
|
|
FLaRe: Achieving Masterful and Adaptive Robot Policies with Large-Scale Reinforcement Learning Fine-Tuning
Jiaheng Hu,
Rose Hendrix,
Ali Farhadi,
Aniruddha Kembhavi,
Roberto Martín-Martín,
Peter Stone,
Kuo-Hao Zeng†,
Kiana Ehsani†
ICRA, 2025
CoRL X-Embodiment Workshop, 2024, Best Paper Finalist
CoRL LLHomeRobots Workshop, 2024, Oral Spotlight
paper /
code /
website /
video
|
|
|
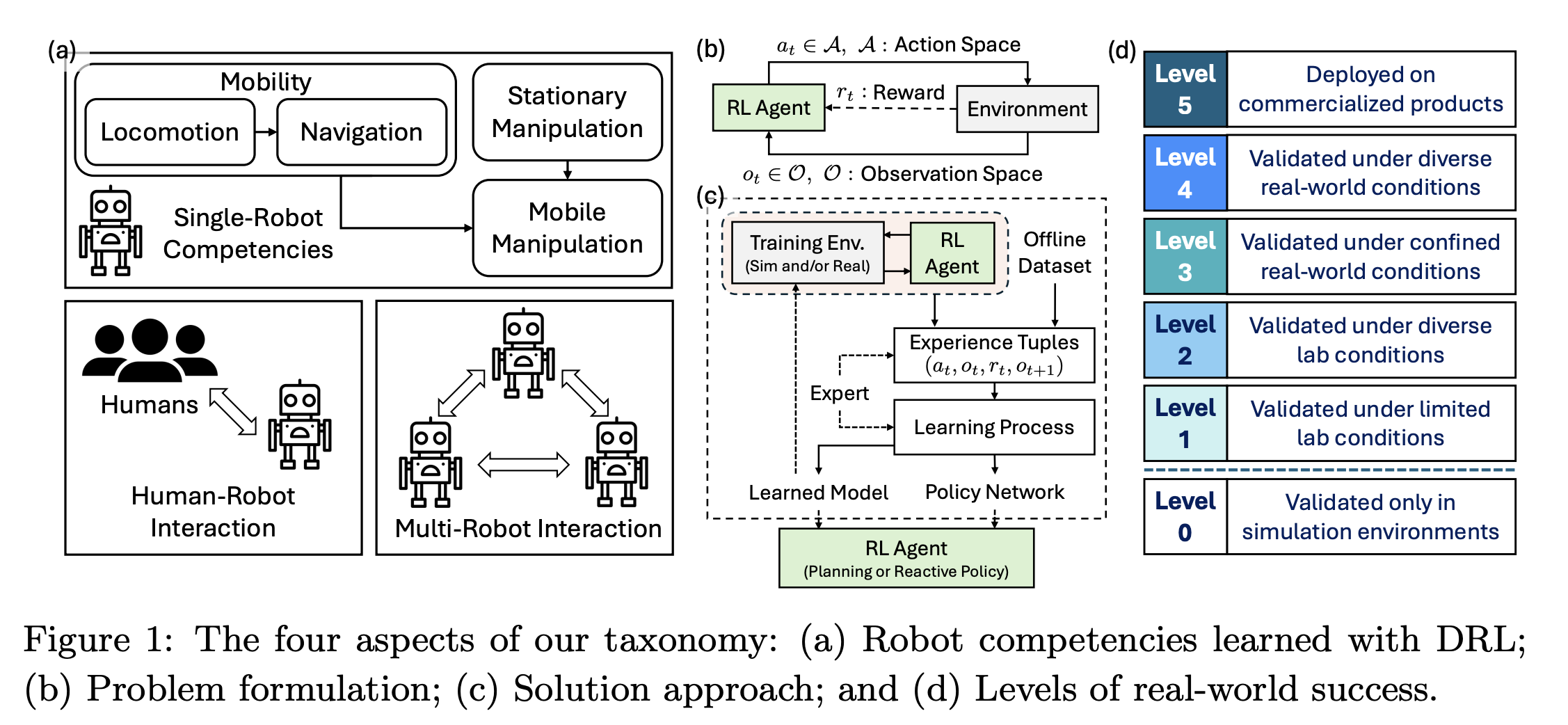
Deep Reinforcement Learning for Robotics: A Survey of Real-World Successes
Chen Tang*,
Ben Abbatematteo*,
Jiaheng Hu*,
Rohan Chandra,
Roberto Martín-Martín,
Peter Stone
Annual Review of Control, Robotics, and Autonomous Systems, 2025
AAAI SMP Track, 2025
paper
|
|
|
SkiLD: Unsupervised Skill Discovery Guided by Factor Interactions
Zizhao Wang*,
Jiaheng Hu*,
Caleb Chuck*,
Stephen Chen,
Roberto Martín-Martín,
Amy Zhang,
Scott Niekum,
Peter Stone
NeurIPS, 2024
paper /
code /
project page
|
|
|
Disentangled Unsupervised Skill Discovery for Efficient Hierarchical Reinforcement Learning
Jiaheng Hu,
Zizhao Wang,
Peter Stone†,
Roberto Martín-Martín†
NeurIPS, 2024
paper /
code /
project page
|
|
|
Learning to Look: Seeking information for Decision Making via Policy Factorization
Shivin Dass,
Jiaheng Hu,
Ben Abbatematteo,
Peter Stone,
Roberto Martín-Martín
CoRL, 2024
paper /
project page
|
|
|
DROID: A Large-Scale In-The-Wild Robot Manipulation Dataset
DROID Dataset Team
RSS, 2024
paper
/
project page
/
data visualizer
|
|
|
Open X-Embodiment: Robotic Learning Datasets and RT-X Models
Open X-Embodiment Collaboration
ICRA, 2024, Best Paper Award
paper
/
project page
/
code
|
|
|
ELDEN: Exploration via Local Dependencies
Jiaheng Hu*,
Zizhao Wang*,
Peter Stone†,
Roberto Martín-Martín†
NeurIPS, 2023
paper /
poster /
video
|
|
|
Causal Policy Gradient for Whole-Body Mobile Manipulation
Jiaheng Hu,
Peter Stone,
Roberto Martín-Martín
RSS, 2023
paper /
website /
code /
poster
|
|
|
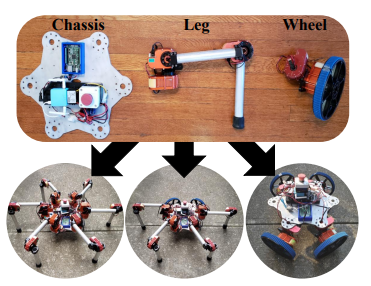
GLSO: Grammar-guided Latent Space Optimization for Sample-efficient Robot Design Automation
Jiaheng Hu,
Julian Whitman,
Howie Choset
CoRL, 2023
paper /
code /
poster
|
|
|
Modular Robot Design Optimization with Generative Adversarial Networks
Jiaheng Hu,
Julian Whitman,
Matthew Travers,
Howie Choset
ICRA, 2022
paper /
code /
poster
|
- Workshop Organizers:
- Conference/Journal Reviewer:
- AI/ML: NeurIPS, ICLR, ICML, AAAI, IJCAI
- Robotics: CoRL, RSS, ICRA, IROS, T-RO, RAL
- Teaching Assistant:
- I'm a big fan of contract bridge, and have been playing in various tournaments over the years.
I was a member of the USBF U31 team, and have won GNT flight C champion (Team NYC)
and the 2nd place in the NABC 0-10k pairs.
- I like video games. Here are some video games I've each spent 1000+ hours on:
- Counter-Strike (Rank: Legendary Eagle)
- San Guo Sha (Here's a video of my game featured by a streamer)
- Pokemon (VGC & All main series games) - check out our pokemon AI!
- I actively follow soccer tournaments, especially Premier League (COYG!) and UCL. I used to play in my highschool varsity and am always down for pickup games.
|